チュートリアル(tutorial)の第5章の前半を公開しました.
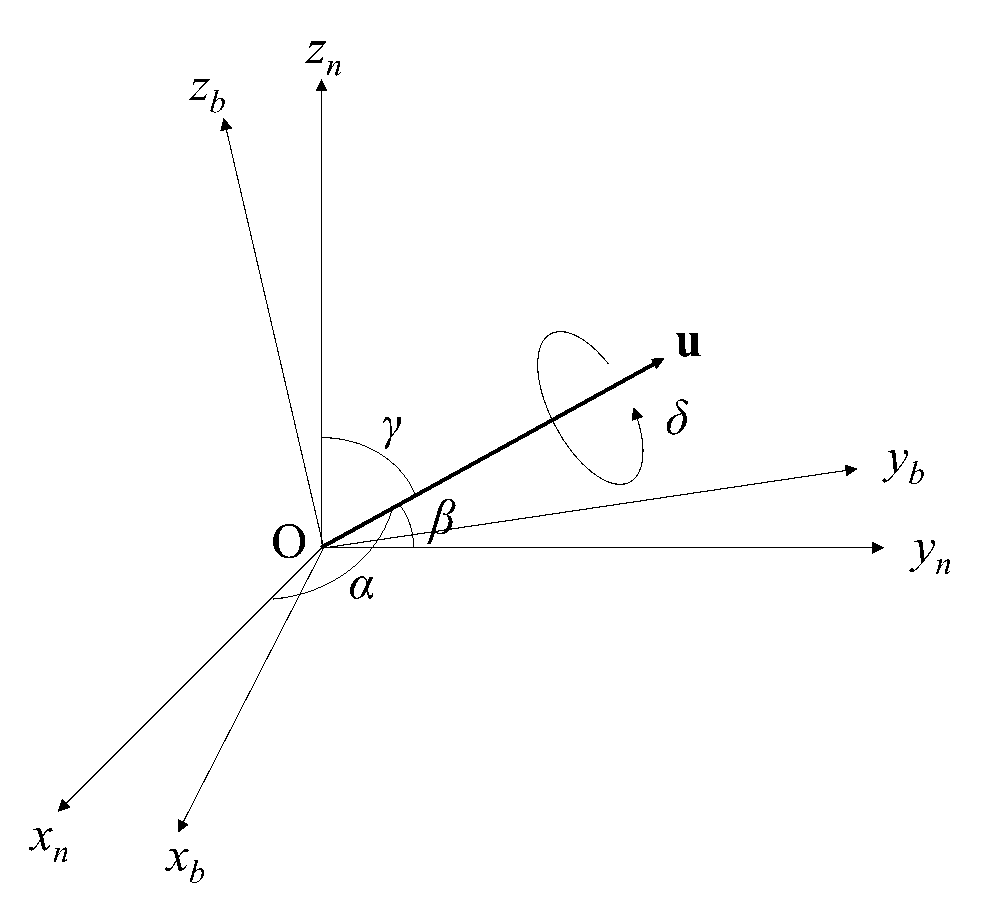
第5章「姿勢」の前半では,移動体(vehicle)の姿勢(attitude)を表現するのに強力なツールとなるクォータニオン(quaternion)を導入し,方向余弦行列やオイラー角との相互関係をくわしく説明します.
第5章「姿勢」の前半では,移動体(vehicle)の姿勢(attitude)を表現するのに強力なツールとなるクォータニオン(quaternion)を導入し,方向余弦行列やオイラー角との相互関係をくわしく説明します.