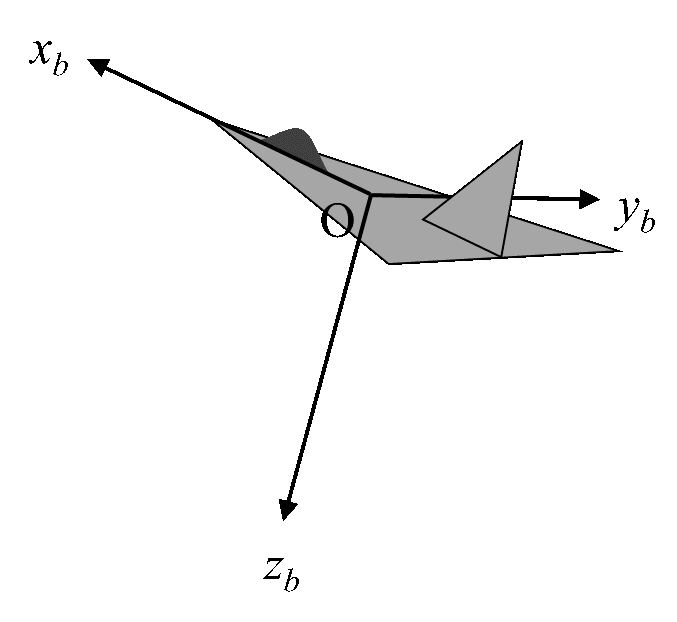
2017年7月17日 / 最終更新日時 : 2020年6月9日 magosaki お知らせ チュートリアル(turorial)の第1章を公開しました. 第1章「序論」では,導入部として,移動体(vehicle)の座標系(frames),慣性計測装置(IMU),慣性航法(inertial navigation)の概要を説明します.